Detection Filters
Effective filtering is essential for optimal Lookout+ performance. This guide covers filtering strategies for different operational scenarios and system configurations.
Understanding Detection Filters
Filtering controls what detections are displayed and processed, directly affecting:
- Visual clutter on detection displays
- Alert frequency and relevance
- System performance and processing load
- Integration with autonomous systems like GAMA
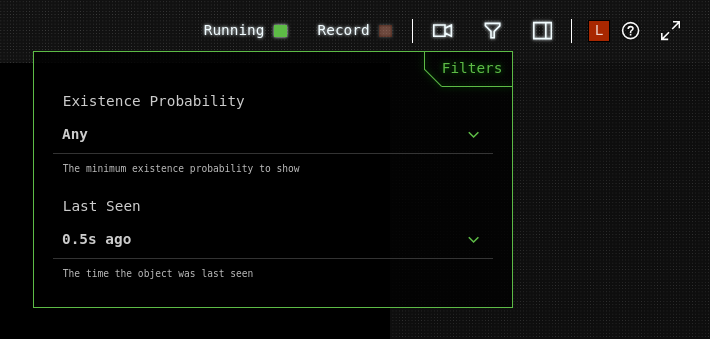
Existence Probability Filtering
Threshold Strategy
The existence probability threshold determines which detections are shown based on AI confidence:
Lower Thresholds (30-60%):
- Show more detections, including uncertain ones
- Higher false alarm rate
- Better for human monitoring where false alarms can be ignored
- Useful for research and comprehensive surveillance
Higher Thresholds (70-90%):
- Show only confident detections
- Lower false alarm rate
- Better for automated systems and collision avoidance
- Reduces processing load and alert fatigue
Application-Specific Settings
GAMA Integration:
- Recommended: 75-85% threshold
- Rationale: Prevents autonomous systems from avoiding non-existent objects
- Impact: Reduces unnecessary course changes and false collision alerts
Human Monitoring:
- Recommended: 50-70% threshold
- Rationale: Operators can visually verify uncertain detections
- Impact: Maintains situational awareness while reducing obvious false alarms
Marine Mammal Observation:
- Recommended: 40-60% threshold
- Rationale: Early detection allows time for avoidance maneuvers
- Impact: Captures more potential wildlife encounters for research
Environmental Filtering Strategies
Clear Weather Conditions
- Lower thresholds: Take advantage of optimal detection conditions
- All object types: Enable comprehensive monitoring
- Fine-tune by time: Adjust for changing light conditions
Poor Visibility (Fog, Rain, Spray)
- Higher thresholds: Reduce false alarms from weather effects
- Focus on larger objects: Prioritize vessel detection over small objects
- Use thermal cameras: Switch to IR detection when available
High Sea States
- Increased thresholds: Minimize false detections from wave action
- Stability considerations: Account for camera motion affecting detection quality
- Size filtering: Focus on objects larger than typical wave features
Night Operations
- Thermal camera priority: Rely on IR detection for primary monitoring
- Adjusted sensitivity: Account for different thermal contrast conditions
- Light source awareness: Consider artificial lighting effects on detection
Quick Reference
Recommended Starting Points
| Scenario | Threshold | Focus | Notes |
|---|---|---|---|
| Autonomous Navigation | 80% | Vessels, large mammals | Reduce false avoidance |
| Collision Avoidance | 70% | All vessels, hazards | Balance sensitivity vs false alarms |
| Marine Mammal Research | 50% | Mammals, swimmers | High sensitivity for early detection |
| Harbor Operations | 75% | Vessels, navigation markers | Reduce clutter from small objects |
| Open Ocean | 60% | All types | Comprehensive monitoring |
Related Documentation
- Detection Concepts: Understanding detection technology
- Managing Detections: Operating the detection interface
- System Alerts: Configuring detection-based alerts
- Troubleshooting Filters: Resolving filter issues