Data Fusion
Data fusion is only available with Lookout+ Nav. This feature requires the advanced sensor suite and processing capabilities of the Nav version.
Lookout+ Nav intelligently combines data from multiple sources to create a comprehensive maritime picture. By fusing information from cameras, AIS, radar, and other sensors, the system provides enhanced situational awareness and more accurate object tracking than any single source could achieve alone.
Data Sources
Lookout+ Nav can integrate data from four primary sources:
- Camera
- AIS
- ARPA Radar
- Synthetic
Cross-Camera Association
- EO to IR correlation linking thermal and optical detections
- Seamless tracking as objects cross camera boundaries
- Enhanced classification using multi-spectral information
- Redundant detection improving overall system reliability
Automatic Identification System (AIS)
- High-quality vessel data including length, beam, heading, and speed
- Identification information with vessel names and registration details
- Position reports broadcast by participating vessels
- Metadata priority - AIS dimensional data preferred over camera estimates
Automatic Radar Plotting Aid (ARPA)
- All-weather detection independent of visibility conditions
- Range and bearing data from radar tracking systems
- Velocity vectors showing target course and speed
- Non-cooperative targets that may not transmit AIS
Simulation and Test Data
- MIS-SIM integration for training and testing scenarios
- Realistic environments for system validation
- Controlled conditions for performance evaluation
- Training applications with known ground truth
Technical Implementation
Data fusion operates in ray coordinate space using unit vectors from a central reference point called the ray_reference.
Fusion Parameters
- Angular Threshold: Objects within 1 degree (default) of each other are candidates for fusion
- Range Correlation: Close-range objects prioritized for association
- Camera-First Architecture: Visual detections anchor the fusion process
Association Logic
The system intelligently matches and merges tracks using:
- Spatial Correlation: Objects within angular and range thresholds
- Temporal Consistency: Maintaining track continuity over time
- Data Quality Assessment: Prioritizing higher-quality source information
- Cross-Boundary Tracking: Following objects between sensor coverage areas
Fusion Behavior
Track Association
When multiple sources detect the same object:
- Best Available Data: System selects highest quality information for each attribute
- Continuous Updates: Real-time refinement as new data becomes available
- Confidence Scoring: Combined confidence levels from all contributing sources
Back-Projection
Objects detected by AIS or ARPA but not visible to cameras:
- Bounding Box Display: Shows estimated object position even without visual confirmation
- "Last Seen" Indication: Camera section will not appear in track information
- Position Estimation: Maintains track using last known position and velocity
Position Prediction
For non-visual sources (AIS/ARPA):
- Forward Projection: Estimates current position from last reported location
- Track Continuity: Maintains association with camera detections when objects become visible
- Duplicate Prevention: Avoids creating multiple tracks for the same object
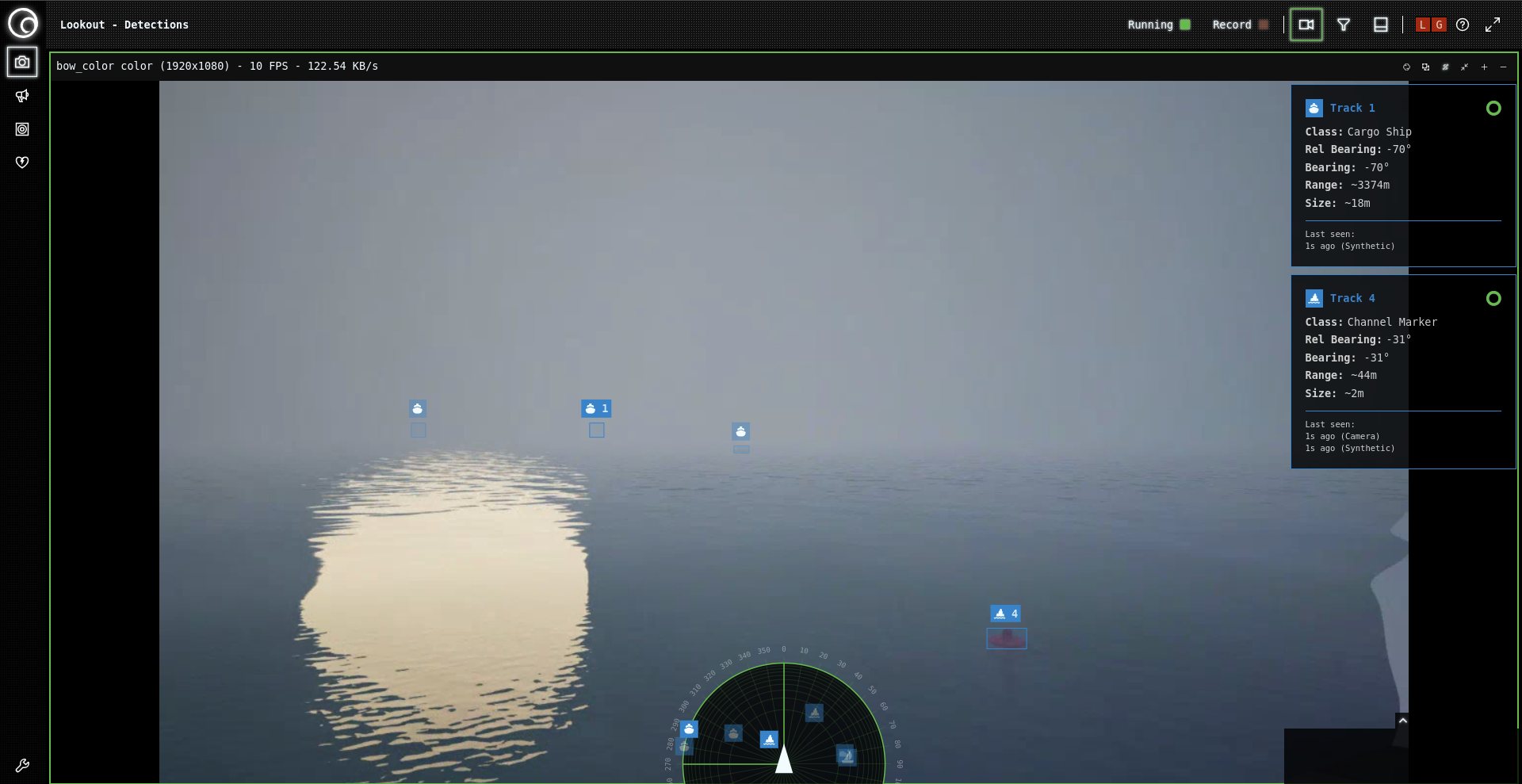
Example showing fusion behavior: Track 1 represents a back-projected object (no camera detection), while Track 4 shows successful fusion between camera and synthetic source data.
Data Quality Hierarchy
Source Reliability
Different sources provide varying quality information:
| Data Type | AIS/ARPA | Camera | Preferred Source |
|---|---|---|---|
| Position | Good | Excellent (close range) | Camera (near), AIS/ARPA (far) |
| Heading | Excellent | Good | AIS/ARPA |
| Dimensions | Excellent | Estimated | AIS/ARPA |
| Velocity | Excellent | Estimated | AIS/ARPA |
Information Priority
When sources conflict, the system applies intelligent prioritization:
- AIS dimensional data (length, beam) preferred over camera estimates
- Camera classification with AIS vessel type code preferred when available
- AIS/ARPA velocity preferred over camera-derived motion estimates
Operational Considerations
Environmental Factors
Fusion effectiveness varies with conditions:
Optimal Fusion:
- Clear visibility enabling camera and AIS/ARPA correlation
- Multiple overlapping camera views
- Active AIS transponders on target vessels
Degraded Conditions:
- Fog/Darkness: Camera detection may fail, relying on AIS/ARPA back-projection
- AIS Gaps: Non-cooperative targets visible only to cameras and radar
- Radar Shadows: Objects hidden from radar but visible to cameras